 Lecturer
LecturerEducation
Ph.D. in Computer Science
Clarkson University, Potsdam, New York, 2025
Master of Science in Computer Science
Northeastern University, Boston, Massachusetts, 2020
Master of Science in Mechanical Engineering
Northeastern University, Boston, Massachusetts, 2014
Bachelor of Engineering in Mechatronics Engineering
Tianjin University of Science and Technology, Tianjin, China, 2011
Teaching
Rochester Institute of Technology
- GCIS123: Software Development and Problem Solving I (Fall 2025)
- ISTE222: Applied Data Structures and Algorithms (Fall 2025-2026)
- ISTE230: Introduction to Database and Data Modeling (Spring 2026, Fall 2025-2026)
- ISTE472: Text Analytics (Fall 2026)
- ISTE610: Non-Relational Data Management (Spring 2026, Fall 2026)
- CINT628: Introduction to Applied Informatics (Spring 2026)
Clarkson University
- CS242 Advanced Programming Concepts in Java (Fall 2021-2024)
- CS444/CS544 Operating Systems (Spring 2022-2025)
- CS451/CS551 Artificial Intelligence (Fall 2023-2024)
- CS460/CS560/EE468/EE568 Database Systems (Spring 2024-2025)
Northeastern University
- CS3520 Programming in C++ (Spring 2020)
- CS5004 Object-Oriented Design (Summer 2018-2019)
- CS5008 Data Structures, Algorithms, and Their Applications within Computer Systems (Spring 2021)
- IS1500 Introduction to Web Development (Fall 2019-2020)
- DS5010 Introduction to Programming for Data Science (Fall 2018, Spring 2019)
Experience
Lecturer
Rochester Institute of Technology, Rochester, New York, 2025 - Present
Ph.D. Research Assistant
Terascale All-sensing Research Studio (TARS) at Clarkson University, Potsdam, New York, 2021 - 2025
Graduate Research Assistant
Helping Hands Lab at Northeastern University, Boston, Massachusetts, 2019 - 2021
Mechatronics Engineer
Perfetch, Malden, Massachusetts, 2015 - 2017
Honors & Awards
Clarkson University Computer Science Outstanding Teaching Assistant Award
 This award is given to a computer science graduate student in recognition of outstanding achievement as a teaching assistant.
This award is given to a computer science graduate student in recognition of outstanding achievement as a teaching assistant.
Certifications
Certified SOLIDWORKS Professional (CSWP) - Mechanical Design
 The CSWP exam is a comprehensive, non-proctored online exam that tests an individual’s ability to design and analyze parametric parts and movable assemblies using a variety of complex features in SOLIDWORKS, including design validation tools. A Certified SOLIDWORKS Professional is an individual that has successfully passed this exam.
The CSWP exam is a comprehensive, non-proctored online exam that tests an individual’s ability to design and analyze parametric parts and movable assemblies using a variety of complex features in SOLIDWORKS, including design validation tools. A Certified SOLIDWORKS Professional is an individual that has successfully passed this exam.
FCC Amateur Radio Service License - Technician
The FCC Amateur Radio Service Technician class license is the entry-level license that gives access to all Amateur Radio frequencies above 30 megahertz, allowing these licensees the ability to communicate locally and most often within North America. It also allows for some limited privileges on the HF bands used for international communications.
Publications
HILO: A Large-Scale Heterogeneous Object Dataset for Benchmarking Robotic Grasping Approaches
Xinchao Song, Sean Banerjee, Natasha Kholgade Banerjee. 2025 International Conference on Automation, Robotics and Applications (ICARA). [Website]
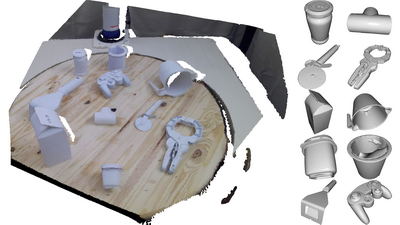
We present HILO, a large-scale comprehensive dataset that contains 253 everyday objects with their HIgh-resolution models and 288 LOw-resolution diverse cluttered scenes with 32,256 sets of RGBD images, masks, and annotations. We conduct bench-marking of three leading grasping approaches on our dataset and reveal the important trade-offs between grasp quantity and quality.
Pix2Repair: Implicit Shape Restoration from Images
Xinchao Song*, Nikolas Lamb*, Sean Banerjee, Natasha Kholgade Banerjee. arXiv preprint:2305.18273. [Paper]
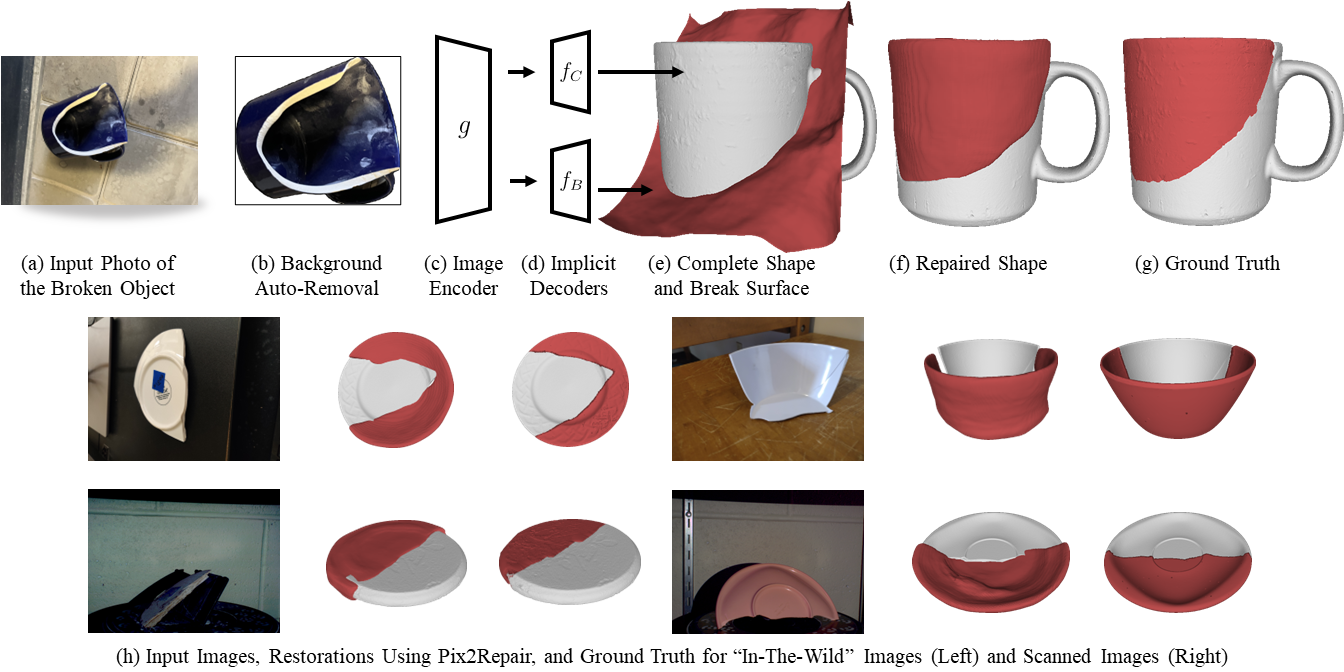
We present Pix2Repair, an automated shape repair approach that generates restoration shapes from images to repair fractured objects. Pix2Repair takes an image of the fractured object as input and automatically generates a 3D printable restoration shape. We contribute a novel shape function that deconstructs a latent code representing the fractured object into a complete shape and a break surface. We also introduce Fantastic Breaks Imaged, the first large-scale dataset of 11,653 real-world images of fractured objects for training and evaluating image-based shape repair approaches.
Reinforcement-Learning Based Robotic Assembly of Fractured Objects Using Visual and Tactile Information
Xinchao Song*, Nikolas Lamb*, Sean Banerjee, Natasha Kholgade Banerjee. 2023 International Conference on Automation, Robotics and Applications (ICARA). [Paper]
We present a reinforcement learning approach that combines visual and tactile information to automatically assemble repair parts to fractured objects. We propose two novel visual metrics, which we term pixel offset error and assembly error, to provide estimation of assembly state. Our approach does not place constraints on object geometry and estimates the assembly state of the constituent objects in real time. We show tightly assembled fractured and restored pairs in simulation and on real robots.
Internet of Robotic Things: Current Technologies, Applications, Challenges and Future Directions
Davide Villa, Xinchao Song, Matthew Heim, Liangshe Li. arXiv preprint:2101.06256. [Paper]
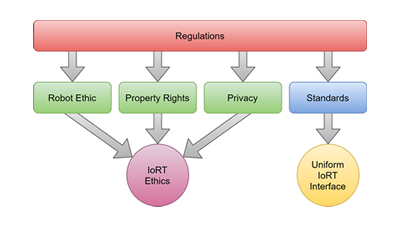
The concept of the Internet of Things (IoT) is becoming increasingly popular, with the number of connected devices reaching billions. This paper focuses on the fusion of IoT and robotics, called the Internet of Robotic Things (IoRT), and discusses IoRT concepts, architectures, use case examples, key challenges, ethical issues, regulations, and future vision. This paper aims to provide a better understanding of the emerging concept of IoRT, its benefits and limitations, as well as guidelines and directions for future research and studies.
Belief-Grounded Networks for Accelerated Robot Learning under Partial Observability
Hai Nguyen*, Brett Daley*, Xinchao Song, Chistopher Amato, Robert Platt. 2020 Conference on Robot Learning (CoRL). [website]
We propose a method for policy learning under partial observability called the Belief-Grounded Network (BGN) in which an auxiliary belief-reconstruction loss incentivizes a neural network to concisely summarize its input history. Since the resulting policy is a function of the history rather than the belief, it can be executed easily at runtime. We compare BGN against several baselines on classic benchmark tasks as well as three novel robotic touch-sensing tasks. BGN outperforms all other tested methods and its learned policies work well when transferred onto a physical robot.